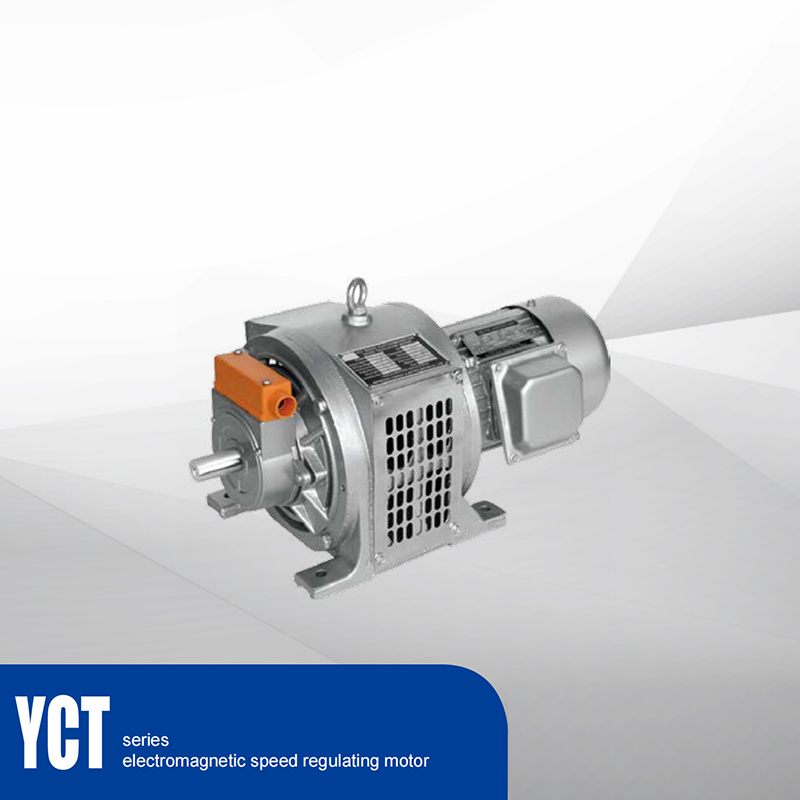
YCT سیریز برقی مقناطیسی رفتار کو کنٹرول کرنے والی موٹر۔
پروڈکٹ کا جائزہ
وائی سی ٹی سیریز برقی مقناطیسی سپیڈ موٹر ایک اے سی مسلسل ٹارک متغیر اسپیڈ موٹر ہے۔ برقی مقناطیسی کلچ ، ڈرائیو موٹر اور ٹیچو جنریٹر کے ذریعے پھسلیں ، عام طور پر جے ڈی ، ٹی ایکس زیڈ ، سی ٹی کے سیریز کنٹرولر کے ساتھ ایکسچینج کے سیٹ پر مشتمل ہوتا ہے۔ ڈرائیو ، ایک وسیع رفتار ہموار سٹیپلیس سپیڈ ریگولیشن ، یہ چین میں ہے ، متحد ڈیزائن نئی برقی مقناطیسی موٹر میں اعلی کارکردگی ، کم شور ، کمپن ، اعلی وشوسنییتا ، اور جمالیاتی ظاہری شکل کے فوائد ہیں۔ اور قومی بین الاقوامی الیکٹرو ٹیکنیکل کمیشن کے مطابق IEC) معیارات۔ سیریز برقی مقناطیسی گورنر موٹر وسیع پیمانے پر ٹیکسٹائل ، پرنٹنگ اور خضاب ، مختلف قسم کے کھانے ، کیمیکل ، کاغذ ، سیمنٹ ، ربڑ ، پلاسٹک ، کیبلز ، دھات کاری ، کان کنی اور مسلسل ٹارک سٹیپلیس اسپیڈ ڈیوائسز کے دیگر شعبوں میں خاص طور پر استعمال کیا جاتا ہے۔ پنکھے ، پمپ ، لوڈ ٹارک کم کرنے کے مواقع کے لیے ، توانائی کی بچت کا ایک اہم اثر حاصل کرنے کے لیے پھولوں کے دباؤ میں تبدیلیوں کو ایڈجسٹ کرنے کی رفتار سے کنٹرول کیا جاتا ہے۔
برقی مقناطیسی رفتار ریگولیٹنگ اسینکرونس موٹر عام گلہری پنجرے غیر متزلزل موٹر ، برقی مقناطیسی پرچی کلچ اور برقی کنٹرول ڈیوائس پر مشتمل ہے۔ اسینکرونس موٹر پرائم موور کے طور پر استعمال ہوتی ہے۔ جب یہ گھومتا ہے ، یہ کلچ کے آرمیچر کو ایک ساتھ گھمانے کے لیے چلاتا ہے۔ الیکٹریکل کنٹرول ڈیوائس ایک ایسا آلہ ہے جو پرچی کلچ کے جوش و خروش کا جوش و خروش فراہم کرتا ہے۔ برقی مقناطیسی پرچی کلچ بنیادی طور پر یہاں متعارف کرایا گیا ہے ، اور اس کی ساخت کو شکل 2-19 میں دکھایا گیا ہے۔ اس میں آرمیچر ، مقناطیسی قطب اور جوش و خروش شامل ہیں۔ آرمیچر ایک بیلناکار ڈھانچہ ہے جو کاسٹ اسٹیل سے بنا ہوا ہے ، جو گلہری کیج اسینکرونس موٹر کے گھومنے والے شافٹ سے جڑا ہوا ہے ، جسے عام طور پر فعال حصہ کہا جاتا ہے۔ مقناطیسی قطب کو پنجوں کے ڈھانچے میں بنایا جاتا ہے اور لوڈ شافٹ پر نصب کیا جاتا ہے ، جسے عام طور پر کارفرما حصہ کہا جاتا ہے۔ ڈرائیونگ حصہ اور کارفرما حصہ کے درمیان کوئی میکانی تعلق نہیں ہے۔ جب جوش کنڈلی کرنٹ سے گزرتی ہے تو ایک مقناطیسی میدان پیدا ہوتا ہے اور پنجوں کی ساخت مقناطیسی کھمبے کے کئی جوڑے بناتی ہے۔ اس وقت ، اگر آرمیچر کو گلہری کیج اسینکرونس موٹر کے ذریعے گھسیٹا اور گھمایا جاتا ہے ، تو یہ مقناطیسی فیلڈ کے تعامل کو کاٹ دے گا اور ٹارک پیدا کرے گا ، لہذا چلنے والے حصے کا مقناطیسی قطب ڈرائیونگ پارٹ کے آرمیچر کے ساتھ گھومے گا۔ سابقہ کی رفتار مؤخر الذکر کی رفتار سے کم ہے ، کیونکہ آرمیچر طاقت کی مقناطیسی لائن کو اسی وقت کاٹ سکتا ہے جب آرمیچر اور مقناطیسی میدان کے درمیان نسبتا movement حرکت ہو۔ اس اصول کے درمیان کوئی ضروری فرق نہیں ہے کہ مقناطیسی قطب آرمیچر کے ساتھ گھومتا ہے اور اس اصول کے ساتھ کہ ایک عام غیر مطابقت پذیر موٹر کا روٹر سٹیٹر سمیٹنے والے گھومنے والے مقناطیسی میدان کے ساتھ حرکت کرتا ہے۔ فرق یہ ہے کہ غیر متزلزل موٹر کا گھومنے والا مقناطیسی فیلڈ تھری فیز اے سی کے ذریعے سٹیٹر وائنڈنگ میں پیدا ہوتا ہے ، جبکہ برقی مقناطیسی پرچی کلچ کا مقناطیسی فیلڈ جوش و خروش میں ڈی سی کرنٹ سے پیدا ہوتا ہے ، اور اس لیے کہ آرمیچر گھومتا ہے۔ ، یہ مقناطیسی میدان کو گھومنے کا کردار ادا کرتا ہے۔ 1 - پرائم موور ، 2 - ورکنگ ایئر گیپ ، 3 - مین شافٹ ، 4 - آؤٹ پٹ شافٹ ، 5 - مقناطیسی قطب ، 6 - آرمیچر برقی مقناطیسی پرچی کلچ کی مکینیکل خصوصیات تقریبا approximately مندرجہ ذیل تجرباتی فارمولے سے ظاہر کی جا سکتی ہیں: n = n0 -kt2 / i4f ، کہاں: N0 - کلچ کے حصے کو چلانے کی رفتار (گلہری کیج موٹر) N - کلچ کے کارفرما حصے (مقناطیسی قطب) کی رفتار؛ اگر
لائبریری لکیری موٹر - ڈونگ فینگ موٹر اشتہار براہ راست جاپان کی ڈونگ فینگ موٹر چلاتی ہے۔ لکیری موٹر پتلی ، اعلی سختی اور اعلی صحت سے متعلق ہے۔ لکیری موٹر براہ راست خصوصی مفت سافٹ ویئر کے مطابق ہے ، تفصیلات دیکھیں>۔
- جوش و خروش؛ K - کلچ ڈھانچے سے متعلق گتانک؛ ٹی - کلچ کا برقی مقناطیسی ٹارک۔ جب مستحکم چل رہا ہو تو ، لوڈ ٹارک کلچ کے برقی مقناطیسی ٹارک کے برابر ہوتا ہے۔
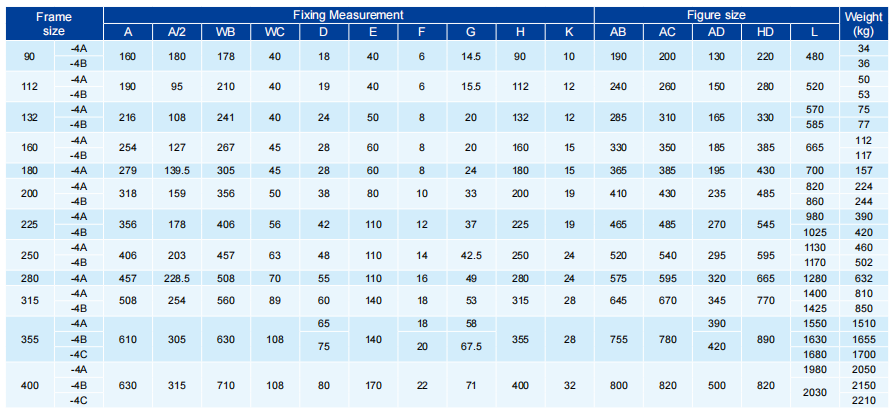
تنصیب کا طول و عرض
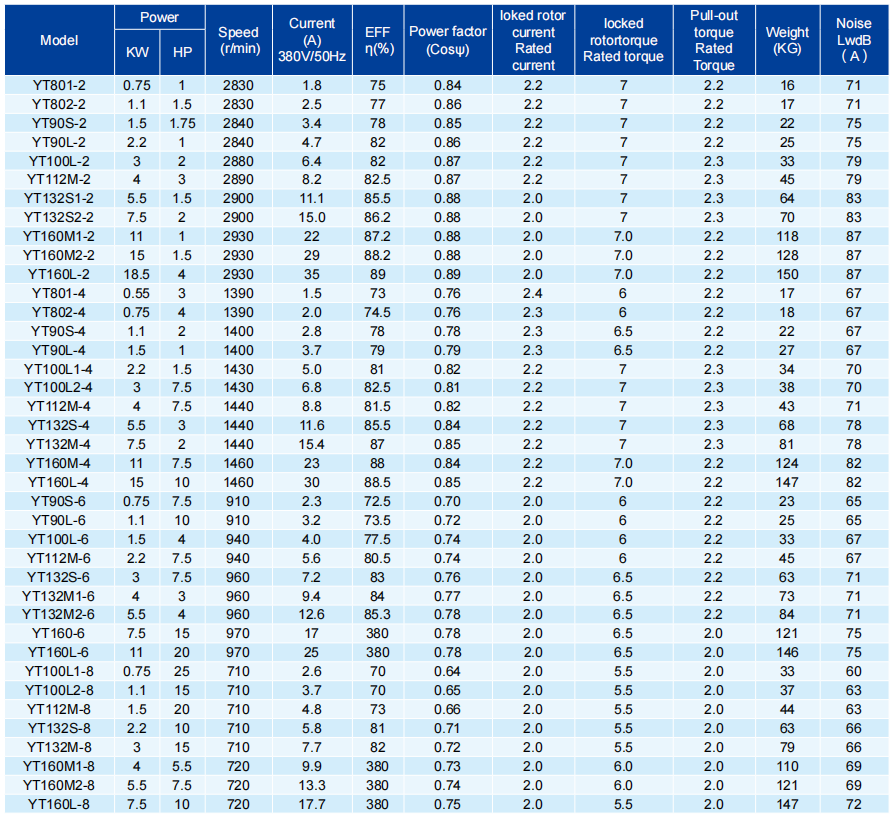
تکنیکی پیرامیٹر
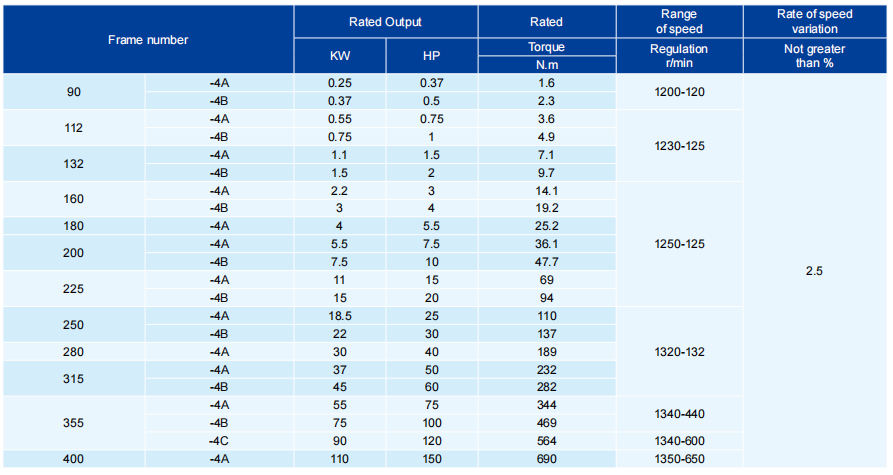

تکنیکی پیرامیٹرز